
液态金属可变形机器人:科幻走进现实
- 分类:科技创新
- 作者:
- 来源:
- 发布时间:2022-08-31 17:56
- 访问量:
【概要描述】液态金属多变形现象的发现,被认为预示着柔性机器人新时代的到来,而液态金属自驱动仿生软体动物效应的发现更将这一研究推向激动人心的热潮。发展至今,液态金属机器人已被公认为机器人领域中最具发展前景的十大方向之一。随着研究的持续推进,一系列形态各异的液态金属机器人正向我们款款走来。
液态金属可变形机器人:科幻走进现实
【概要描述】液态金属多变形现象的发现,被认为预示着柔性机器人新时代的到来,而液态金属自驱动仿生软体动物效应的发现更将这一研究推向激动人心的热潮。发展至今,液态金属机器人已被公认为机器人领域中最具发展前景的十大方向之一。随着研究的持续推进,一系列形态各异的液态金属机器人正向我们款款走来。
- 分类:科技创新
- 作者:
- 来源:
- 发布时间:2022-08-31 17:56
- 访问量:
来源 | 上海《科学》杂志2022年第74卷第2期
题目 | 液态金属3D打印技术
作者 | 汪鸿章 陈 森 单晓晖
液态金属多变形现象的发现,被认为预示着柔性机器人新时代的到来,而液态金属自驱动仿生软体动物效应的发现更将这一研究推向激动人心的热潮。发展至今,液态金属机器人已被公认为机器人领域中最具发展前景的十大方向之一。随着研究的持续推进,一系列形态各异的液态金属机器人正向我们款款走来。

机器人是一种能够自主或半自主执行功能的智能机器,有没有一种机器人可在不同形态之间任意切换,以执行传统机器人难以完成的特殊任务?如在抗震救灾过程中,机器人可改变自身形态,穿越建筑废墟的狭缝,完成探测救援任务;又如,在遭受巨大的破坏后,机器人可瞬间自修复,继续执行功能。这一功能的实体早在中国神话故事中就已出现:“土行孙”可直接穿越泥土的狭缝;孙悟空具有随意变身的法术。实现任意变形的功能不仅仅是出现在神话中,也是全世界科技界和工程界的夙愿。科幻电影《终结者》中的可变形液态金属机器人T-1000则将这一夙愿推向了高潮。液态金属机器人可以化成流淌的液体钻过任意狭缝,又可缓缓浮出地面,自组装成人形;即使身体裂开两半,也可以瞬间恢复如初。这一天马行空想象,成为一批科学家矢志不渝、努力奋斗的终极目标。T-1000的科技原型液态金属机器正是他们所研究的对象,而中国在这一领域处于国际竞争的前沿。
液态金属可变形机器人示意
液态金属典型特征是具有良好的流动性、超高的导电导热特性、低熔点和高沸点、高表面张力、多刺激响应特性。液态金属可变形机器人主要是由镓和镓基合金构成,具备智能响应特性,可自主或半自主执行功能,为智能机器人的研究提供了广阔的空间。液态金属机器人技术一旦突破成功,将科幻带进现实,必将革新人类日常生活的方方面面。
液态金属大尺度变形现象
2014年,我国科学家首次揭示了液态金属可在不同形态之间可逆切换行为 [3],开启了液态金属可变形机器从科幻逐渐走进现实的新时代。研究者发现,浸没在水中的镓基液态金属可在低电压刺激下,呈现出大幅度变形行为,一滩液态金属可在瞬间收缩为金属液滴,表面积变化可达上千倍,甚至可以轻易钻过较自身狭窄多倍的缝隙。液态金属可以“分身”出若干金属液滴,并有序向一侧移动;不仅如此,两个分离的液态金属球可以相互靠近并融合,合二为一。调整电压和电极位置,液态金属还可以实现高速自旋运动以及定向高速运动。进一步地,研究者发现通过化学—电学协同控制,精确调控表面张力,可实现完全可逆的变形行为,液态金属可以在球体和铺展状态之间可逆调节。研究者揭示了这一系列变形行为与界面双电层的形成和液态金属表面可逆氧化有关。调整接触基底、电解质类型,还可以实现更多千奇百怪的行为。例如,在浸入碱性溶液的石墨表面,液态金属可以快速铺展开来,能被塑造成更多形状。在电场作用下,液态金属甚至可逆重力蠕动爬行。结合3D打印固体器件,液态金属还可以作为可变形车轮,在低电压刺激下,即可带动车身运动,遇到狭窄的槽道,液态金属变形以带动车身钻过狭缝。
研究团队进一步拓展了液态金属可变形机器的多场驱动方式,通过金属胞吞作用,赋予液态金属以磁响应特性,以摆脱机器受限于溶液环境的问题,从而实现三维空间的可控运动。通过磁场调控,液态金属机器还可实现可逆的固液切换,使得刚柔并济的可变形机器人成为了可能。
这些基础发现革新了人们对于液态金属可变形机器的认识,通过传统的刚性材料或流体是难以复现上述现象。事实上,这些行为已经满足构筑液态金属可变形机器的基本要素,为研制新型可变形机器开辟了全新途径。这一工作在国际上引发重大反响,成为液态金属可变形机器人领域的开端。
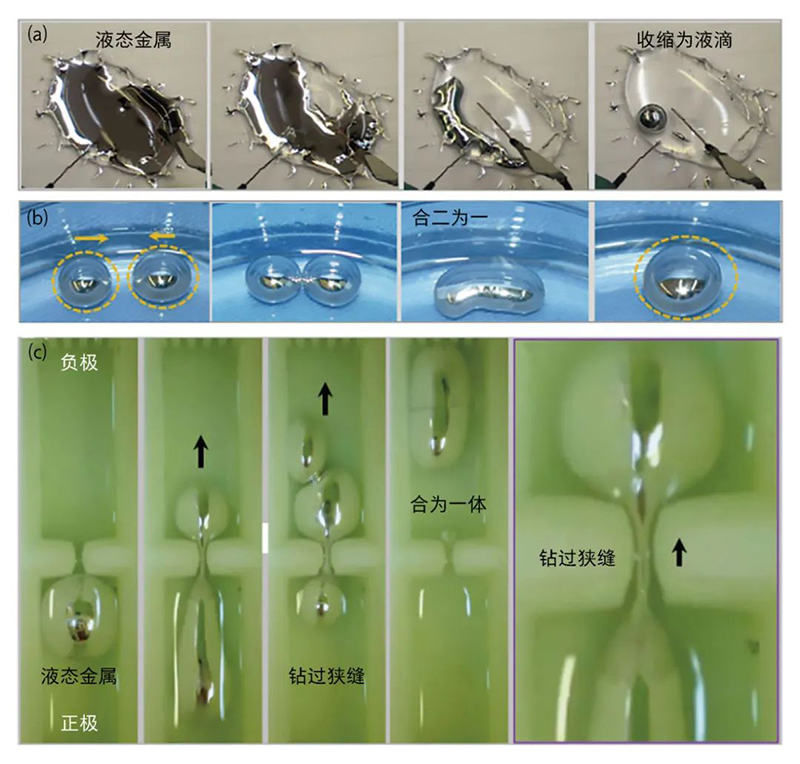
液态金属大尺度变形与运动 (a)一滩液态金属收缩成为一滴金属球;(b)两滴液态金属球融为一体;(c)液态金属球在电场刺激下钻过较自身狭窄多倍的狭缝,穿越后恢复原状。
液态金属爬行机器人
爬行软体机器人是一类用柔性可变形材料研制的机器人,能够自由改变自身的形状,实现多种运动功能。自然界中各种生物经过数亿年的演化,可以通过各种身体变化以在复杂的自然环境中快速运动。例如,树上的尺蠖利用身体的收缩以及头部和尾部摩擦力的变化,实现定向蠕动爬行,在树叶间来回穿梭。液态金属具有良好的热导率,可以更快地传导热量,研究人员利用这个特性,从而仿生制造了一种可以在温度刺激下可控运动的爬行机器人。研究人员巧妙地将高导热率的液态金属与低沸点液体和硅橡胶混合,开发出一种具有温度响应功能的液态金属复合材料作为爬行机器人躯干,使其可在外界温度刺激下实现快速大尺度膨胀和收缩。借助结合3D打印技术加工的具有选择性抓取和放松(改变摩擦力) 的双足,爬行机器人可以在冷热刺激下充分发挥液态金属复合材料的可控收缩和膨胀性能,以改变机器人躯干的长度,驱动机器人向前运动。
不仅仿生蠕虫爬行机器人的研发和应用受到了广泛关注,弹跳、滚动等运动形式的机器人也引起研究人员的兴趣。例如,利用液态金属产生氢气后使其爆炸提供动力,可使弹跳型运动机器人实现自身高度数十倍的跳跃并轻松跨越障碍,展现其在探险和救援领域的巨大应用潜力;利用热刺激、电刺激或化学刺激等方式持续驱动液态金属液滴运动,可使轮式液态金属运动机器人改变重心,实现持续滚动功能。这一系列液态金属爬行运动机器人的创新研究与新型应用,弥补了传统刚性机器人刚性结构及驱动复杂等缺陷,扩大了机器人的应用范围,促进了特种机器人系统的发展。
液态金属水下机器人
我们生活在一个蓝色星球,其中水域面积占地球总面积的71%左右。在这广阔无垠的水面下蕴藏着巨大的宝藏,而为了对水下情况进行探索就须使用水下机器人。对于水母,相信很多人都见过,它晶莹剔透,游动时动作优美、流畅、灵活、高效,因而成为水下机器人领域竞相模仿的对象。液态金属在室温条件下具有良好的流动性和导电性,研究人员基于此特性制造了一种可在水下工作的水母机器人并完成了综合测试 [6]。为了制备液态金属水母机器人,研究人员首先通过倒模制造了硅胶流道,将液态金属注入流道中,由此可制成具有液态金属线圈的弹性膜。然后,永磁铁被放入水母伞状体中用以产生磁场,在永磁铁产生的磁场中,对液态金属线圈通入电流使薄膜受到安培力作用。当通交流电时,薄膜将受到吸引和排斥的力,通过上下运动带动周围的薄膜以及触手运动。该方法利用液态金属柔性线圈在电磁场中的运动实现了液态金属水母机器人在水下的运动。实验表明,此仿生水下机器人运动轻柔,对周围生物的影响甚微,具有独特的优势,有望用于水下救援、调查取样、海底监测、资源探测等各种领域。
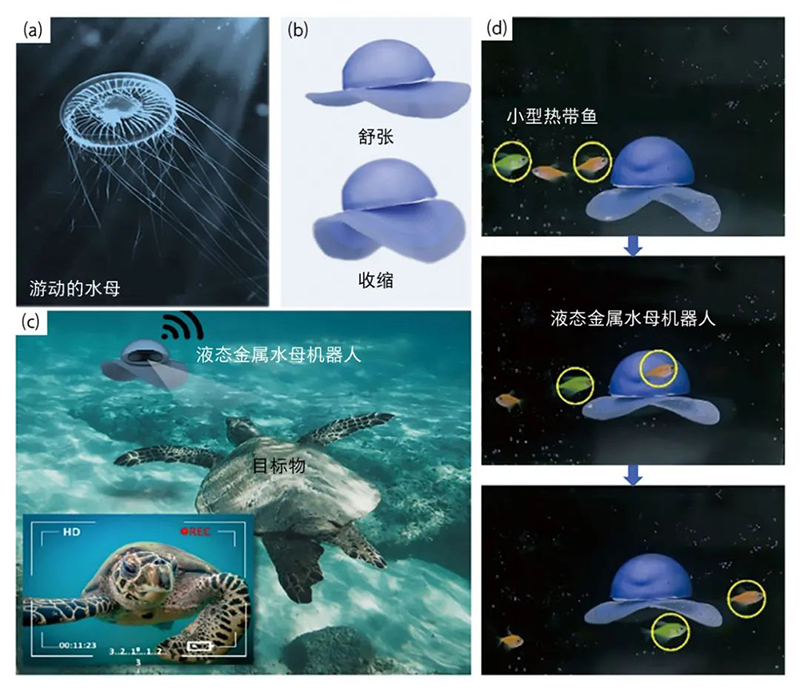
液态金属水下机器人 (a)游动的水母;(b)液态金属水母机器人;(c)液态金属水母机器人用于监测;(d)液态金属水母机器人运动轻柔,不会影响游动的小鱼。
液态金属微纳米机器人
微纳米机器人属于分子仿生学的范围,以分子水平的生物学原理作为设计原型,在微纳米空间制作微型机器人。因为其独特的优势,微纳米机器人研究吸引了国内外大量研究人员的关注,一些科研成果已经开始用于医疗和国防等领域。以往的研究中,研究人员利用已知的生物或细胞结构作为纳米机器人的结构骨架来制备微纳米机器人,获得了纳米齿轮、纳米马达、血管机器人等多种微纳米机器。那么液态金属作为一类性能优异的可被多场驱动的智能软材料,能否用于制造微纳米机器呢?答案是肯定的。经过数年的努力,我国液态金属微纳米机器人技术获得了长足的发展,研究人员制造了多种液态金属微纳米机器人,并且逐步将这些机器人应用于实际中。研究人员也发现,声场也可对大量液态金属微纳米颗粒进行调控,实现液态金属微纳米液滴运动等功能 [7]。利用这种声场驱动的特性,液态金属微纳米机器人可用于靶向疾病治疗。基于液态金属的优异特性,我们有理由相信在不远的将来,液态金属微纳米机器人将在更多的领域发挥更大的作用。
液态金属自驱动机器人
液态金属最令人惊异的行为或许是可以像生命那样通过吞食“燃料”获得长时间运动的能力。世界上首个液态金属自主运动机器或称仿生软体动物于2015年诞生 [8],宣告液态金属智能机器迈入新时代,为人类研制自主独立的可变形机器“终结者”指明了方向。研究发现置于电解质溶液中的液态金属可通过“吞食”微量铝箔补充能量,实现高速、高效的运动,直径仅为几毫米的金属机器可以持续运动超过1小时,速度每分钟可达数千毫米。有意思的是,该变形机器不仅能在自由空间运动,在特殊槽道空间亦可蜿蜒前行,还可根据槽道宽窄调节自身体积从而顺利通过。在圆形槽道中的液态金属机器可被分离成若干个小型液态金属机器,它们可以相互追逐,最终能融为一体,继续运动。该液态金属机器的尺寸可大可小,从数十微米到数十毫米不等。在中性溶液乃至酸碱溶液中均可自主运动。更有趣的是,液态金属机器置于电解质溶液中的石墨表面,可以自主伸出“伪足”,仿佛在探索周围的环境,这已经相当接近于自然界的原生动物。
自驱动现象背后的机制也被揭示,液态金属、金属燃料等形成的内生电场,诱发了液态金属的表面张力差异,从而对变形的液态金属机器带来了强大推力。另外,电化学反应过程中产生的气体进一步为液态金属运动提供了助力。双重作用产生了液态金属自驱动行为。研究者基于此原理研制了无需外界电力的液态金属泵,可以实现药液和冷却流体的输运,有望用于血管或腔道机器人、芯片冷却装置等。这一突破性发现为研制实用化可变形机器人奠定了理论和技术基础,在国际上引起了较大反响,先后得到Nature、Nature Materials、Science News等的评介报道,国际知名杂志发表评论称“真正的液态金属终结者T-1000诞生于中国实验室”。
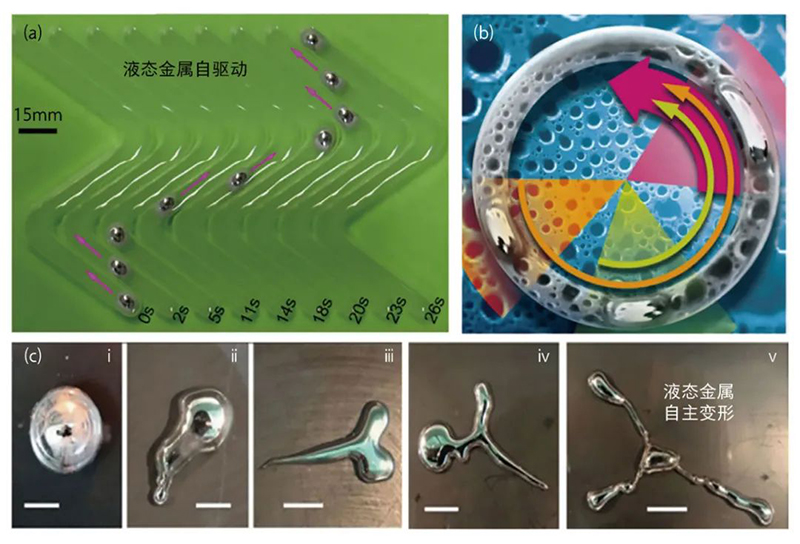
自驱动液态金属机器 (a)单个液滴自驱动并沿着Z形轨道蜿蜒前行;(b)3个液态金属机器相互追逐行为,最终融为一体;(c)自驱动液态金属自主变形行为,仿佛原生动物伸出伪足。
结 语
总的来说,不同于传统的固态机器,液态金属机器的问世引申出全新的可变形机器人概念,已被公认为机器人领域最具发展前景的重大方向之一。液态金属机器还处在方兴未艾的早期阶段,大部分属于基础技术探索,成熟的产业应用非常少,距离研发出实际可应用于生活的“终结者”变形机器人还有很长的路要走。不过毫无疑问,目前取得的系列进展足以令人兴奋,从宏观到微观均有涉及,科幻电影中的情节也与现实越来越近,有望满足科学界和工业界对可变形机器的重大需求。因此需要一大批学者和产业界通力合作,构建基础理论框架,突破技术瓶颈,把握发展机遇,推动液态金属可变形机器人早日落地产业化。
国内团队目前仍然占据液态金属可变形机器人领域的研究高地,包括清华大学、中国科学院、中国科学技术大学、哈尔滨工业大学、苏州大学、北京航空航天大学、武汉大学、华中科技大学、深圳大学等研究机构的学者和产业界做出了突出贡献。作为新兴概念和产业,液态金属可变形机器蕴含着众多的研究机遇,诸如液态金属智能复合材料的发展,揭示新材料的独特变形运动机理,构筑调控手段;液态金属与生物学、机器人、电子学等领域的交叉融合,进一步促成液态金属可变形机器人理论与应用技术体系革新,为学科前沿提供丰富的研究空间;从工业实际需求切入,精准推动液态金属可变形机器人的基础研发,构建配套基础设施,并逐渐培育产业化市场,促进工业体系发展。
扫二维码用手机看
推荐产品

-
咨询时间:
8:30—11:30
13:00—17:30
0874-7833033
-


顶部
版权所有:云南科威液态金属谷研发有限公司 滇ICP备16003182号-3  滇公网安备53038102530551号
滇公网安备53038102530551号